|
Download Members: $0.00 Non‑Members: $75.00 |
Buy Now |
Publication Details
| Published Date: | |
|---|---|
| Citation: | John W Dorsey Palmateer |
Abstract
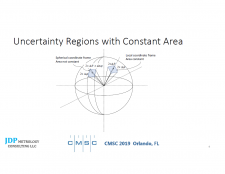
Kinematic modeling of trackers has typically used Euclidean vectors. Measurement uncertainty is estimated with Monte Carlo methods or linear propagation of errors, operating on the parameter for range, horizontal, and vertical angles. A downside of this modelling is that uncertainties in the horizontal (longitudinal) direction are unrealistically reduced (i.e. go to zero) as measurements approach zenith and nadir. Reformulating the tracker kinematic model in terms of quaternion vectors offers an opportunity to take a different approach to tracker kinematics and uncertainty. Quaternions have been applied to computer graphics, inertial navigation, and robot kinematics to solve various problems—such as gimbal lock—found with Euclidean vectors. The reformulation of tracker kinematics in terms of quaternion vectors produces horizontal uncertainties that are not affected by elevation angle, and thus maintain a consistent uncertainty for any direction of measurement.



